Járművezetést támogató rendszerek több évtizede léteznek, ahogy teljesen automatizált metróhálózatok mellett most már kötött útvonalú, önvezető buszokba is belefutni. Az viszont, hogy saját járművünk csettintésre, sofőri felügyelet nélkül a kívánt célhoz elvigyen, még sokévnyi fejlesztés és eséllyel új járgány szükséges. A Waymo jó úton halad limitált, vezető nélküli robotaxi szolgáltatásával pár álmos amerikai városnegyedben, autóin méretes, méregdrága szenzorszettel, élén a magas szintű 3D letapogatására képes LiDAR érzékelőkkel. Emellett, ahol a Waymo bétás utasszállítója rendelhető, ott a teljes lefedett területet az utolsó négyzet cm-ig letapogatják és vektortérben újraalkotják, hogy a jármű mindig tudja hajszálpontos pozícióját a térben. Bármely úthálózatot érintő változtatás (lezárás, felújítás, átalakítás) újabb helyszíni szkellenést igényel.
Míg a Waymo az Egyesült Államok nyugati partján tesztel, addig a Mobileye az átellenes oldalon keleten (illetve Izraelben és Németországban), és az utóbbi nagyobb hangsúlyt fektet a kamerákból nyert információra, bár maga is saját lézeres szenzoron dolgozik. Közös a két törekvésben a saját vagy partneri flotta, illetve az önvezető taxiszolgáltatás indítása rövidtávon, a járművek központi felügyeletével, azaz még odébb, hogy az egyszeri autótulajdonos járművéből autonóm közlekedési eszközt varázsoljanak, a dolog szabályozási és biztosítási oldalról nem is beszélve.

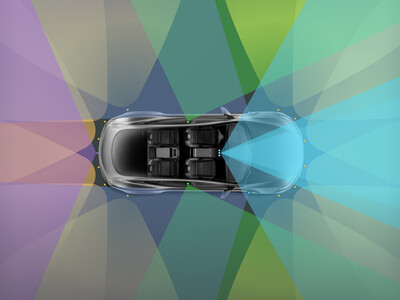
A Tesla robotpilóta szenzorpakkja kamerákkal és ultrahangos érzékelőkkel, immár radar nélkül (forrás: Tesla) [+]
Mint mindenben, Elon Musk önvezetésben is hozza konok/vitatatott zseni formáját, mindjárt azt a célt kitűzve, hogy bármelyik Tesla bárhol, bármikor képes legyen önmagát elnavigálni anélkül, hogy céges tesztautó vagy robotaxi flotta része lenne. Az önvezetéshez szükséges vektorteret a jármű kizárólag kamerákból alkotja meg, pár ultrahangos közelségérzékelővel finomítva. A radar és LiDAR szenzorok ugyanis méretesek, drágák, sokat fogyasztanak és előfordul, hogy a kamerainformációkkal összeakadnak. Mivel pedig a Tesla fapados szenzorszettje pár száz dollár, amihez fejlett FSD önvezető chip tartozik, a szettet évek óta minden modellbe beépítik, azaz a kétmilliós lakossági flotta többsége rendelkezik autonómiához szükséges hardverrel – a szoftvercsomagot persze azért meg kell vásárolni.
Loving the new “birds eye” view at intersections. Nice touch pic.twitter.com/YTp3a1f9GQ
— Brandonee916 (@brandonee916) September 12, 2021
Az autópályákon, baleseti statisztikákkal összevetve már jól működik dolog (felhasználói felügyelettel), és a sávtartás- és sávváltás, a sebesség szabályozása forgalom szerint, a fel- és lehajtás, az előzés, a lehúzódás vagy a lassítás megkülönböztető jelzést használó járművek melletti 2021 végére elég megbízható lett, városban azonban egyelőre limitált a siker. Szép dolog ugyanis a KRESZ és egy idealizált úthálózat, csakhogy a városok és a passzoló közlekedés kaotikusan fejlődött, a szabályokat néha a tervezés is lazán értelmezi, sok a szűk utca, a rosszul parkoló autó, a beláthatatlan kereszteződés, a kátyú, a hiányos felfestés, a pillanatnyi lezárás és felújítás. És akkor ott a tanulóvezető, a felelőtlen, a fáradt, a piroson áthajtó meg ugye a köd, a jég, a koromsötét és az előugró rolleres, gyalogos. Máris érthető, miért operál a Waymo is Amerika legkisebb baleseti kockázatú negyedeire szűkítve.
A városi és autópályán kívüli, hatékony önvezetés a Teslánál is terítéken van, és FSB Beta program bő egy éve indult szűk körben, de nyíltan, azaz pár egyszer Tesla tulajdonos is részt vehetett benne és megoszthatta tapasztalatait, videóit róla. Az önvezető kódot egyelőre NVIDIA-alapú, neurális hálózatot használó tréning számítógép írja, és az aktuálisan legfrissebb változatot a járművek vezetékmentesen telepítik, majd a kamerák által látottak alapján alkotott vektortérben használják. Egy-egy Tesla tehát önmagát nem tanítja meg jobban vezetni, ehelyett kulcsfontosságú anonim információt küld a szervereknek, önvezető módban és a háttérben egyaránt. Ősszel bővült a nyílt béta mindazokkal, akik az FSD csomagra beruháztak (10 ezer dollár egyszer, vagy 100 havonta), és akik a Tesla vezetésviselkedési felmérése alapján 100, 99, 98 stb. pontszámot értek el.

Az FSD Beta program leírása az autó képernyőjén. (forrás: Tesla Daily) [+]
Kéthetente frissül az FSD Beta kód, és nagyjából ugyanilyen ütemben a felhasználók száma pontszámtól függően, akiknek persze bele kell egyezniük a szigorú vezetésfelügyeletbe, gyors beavatkozásra készen egyetlen kormány- vagy pedálmozdulattal. A rendszer kormányra gyakorolt nyomást és a fedélzeti kamera alapján az út szemmel való követését igényli, és aki nem elég elővigyázatos, azt dobják a programból. A villanyautó márka törekvéseit azért is érdemes követni, mert a Tesla nyílt lapokkal játszik, nem cenzúrázza a felhasználói videókat és így objektíven nyomon követhető a rögös fejlődés jól összevágott promóvideók és városnegyedekre redukált, ott nyilván patent működés helyett. A mindennapi ember által feltöltött klipek pedig a témakörben érdeklődőknek meglehetősen érdekesek.
A béta ma 10.5-ös verziónál tart, amely drasztikusan előrelépett a 8-as és 9-es főverziókhoz képest egy év alatt, emberibben navigálva az utakon, komolyabb hangsúlyt fektetve az eddig is prioritást élvező gyalogosok és kerékpárok védelmére. Ügyesebben navigál a parkolókban és a szirénázó járművek környékén, magabiztosabb a kereszteződésekhez érve és az elsőbbséget megadva, lassít fekvőrendőröknél, kikerül álló járműveket, kukákat, hórakásokat és csoportokat stb. Sok tulajdonos számol be negyedórás, vagy annál is hosszabb, beavatkozás nélküli városi önvezetésről (autópályán órákig hibátlan szokott lenni a dolog), néha komplex úthálózati és pillanatnyi szituációkat könnyedén megoldva. Bóják, út közepén parkoló jűrmű biztonságos kikerülése, szembe jövő jármű elől lehúzódás, az átkelő felé robogó gyalogos, kerékpár előtt lassítás a kalkulált pálya alapján vagy nehezen belátható kereszteződésben óvatos előregurulás és kikandikálás a keresztforgalom észlelésére.
Máskor viszont gyermeteg hibákat vét a rendszer – mondjuk totojázik nagyívű kereszteződésbe hajtva, rossz sávba kanyarodik, indokolatlanul lassít, elvét egy jelzést, félreértelmez egy táblát, sebességgel áthalad egy rázós vasúti átkelőn stb. Extrém helyzetekben, mint a hegyi hajtűkanyarok, bőven van hova fejlődnie, és egyelőre tolatni sem tud. Más esetekben pedig látszik, hogy megvannak az aktuális kamerapozícióknak a korlátai, például kereszteződéshez érve takarásban, amikor az embernek is nyújtózkodnia kell, hogy lássa a nagy sebességű keresztforgalmat. Szóval egyáltalán nem biztos, hogy minden esetre elég lesz a Teslák jelenlegi hardvercsomagja – a következő a Cybertruckkal érkezik jövőre, négyszer erősebb HW4 chippel.

Mintha mobilfrissítés lenne: FSD Beta 10.5 hibajavítási lista (forrás: Tesla Daily) [+]
Ami a baleseti statisztikákat illeti egy év távlatából, pármillió levezetett kilométer után az amerikai autópálya rendészetet (NHTSA) egy FSD béta incidensről tud, bár a tulajdonos leírása, miszerint Teslája a kormányon történő beavatkozása ellenére erőből rossz sávba kanyarodott, és balesetet okozott, a béta megszakítási elve alapján legalábbis vitatható. A nyomozás majd tisztázza, az viszont biztos, hogy lesznek még balesetek, hiszen ez statisztikailag elkerülhetetlen, és nyilván jogi csatározások is követik majd a dolgot a felelőst illetően (jelenleg a béta tesztelőt illeti). A viták már ma hevesek: egy dolog, hogy egy Waymo központi felügyelettel, és ha be kell ülni, betanított sofőrökkel működteti tesztflottáját, és másik, hogy Musk az FSD bétát a lakosság számára elérhetővé teszi. Akik persze fizettek érte, és jó vezetési pontszámmal rendelkeznek, szívesen részt vesznek a dologban, még ha bérmentve is szolgáltatnak a Teslának értékes tesztadatokat.
Az FSD Beta 10.5 egyébként akár csak az ősz eleji változatokkal összevetve is látványosan kevesebbet hibázik, azaz a fejlődés üteme gyors és egyre növekedik, pedig még munkába sem állt a Dojo, a Tesla saját tervezésű D1 chipjeit használó szuperszámítógépe, amely 2022-23 magasságában adhat további lendületet az egyre több vezetésadatból dolgozó, de szimulációt is használó kódnak. A cél a buta hibák után a ritkábbak eliminálása, illetve az extrém ritkán előforduló esetek lefedése, végül pedig az általános önvezetés bárhol, bármikor, a helyi szabályokat betartva. A mikor kérdésére viszont még csak tippelni sem érdemes, ahogy azt sem tudni, hogy a mistani Teslák hardveres kapacitása egyáltalán elég lesz-e a dologhoz.

A hosszú élettartamú robotaxikhoz kitartó komponenseket is kell tervezni – a képen a Tesla strukturális akkupakkja [+]
Bárhova is jusson az FSD béta vagy végleges formában, a szabályalkotóknak biztos lesz egy-két szava, mielőtt engedi felügyelet nélkül munkába állítani. Bizonyos szabályok már most meghatározzák, milyen feltételek mellett működhetnek sofőr nélküli járművek, akár az amerikai, akár az európai vagy magyar utakon, bár ezek sokszor technikai és biztonsági jellegű előírások, és tesztjárművekre, illetve célflottákra vonatkoznak, nem lakossági járművekre és használatra. Nem mindegy viszont, hogy ki mikor jut el a széleskörű, nagy lefedettségű, sofőr nélküli autonómiáig, hiszen a robotaxi piac a semmiből az évtized végére akár 12 billió dollár értékűre gyarapodhat, és nem kizárt forgatókönyv, hogy ha a Tesla sikerrel jár, a pár év múlva esedékes, legolcsóbb járgányát a gyárból mindjárt saját taxiflottája szolgálatába állítja. Addig persze aludni kell még jó sokat, de legalább videókon nyomon követhető a fejlődés, minden boldog és szomorú momentumával.